- Hronika
- Kolumne
-
Radio
- Izdvajamo
-
Emisije
- Novosti dana
- Dokumentarni program
- Pop top
- Europuls
- Zrno po zrno
- Radio ordinacija
- Kulturna panorama
- Zelena priča
- Epoleta
- +382
- Spona
- Svijet jednakih šansi
- Matica
- Život po mjeri čovjeka
- Link
- Izokrenuti svijet
- Koracima mladih
- Moja profesija je...
- Sportski program
- Kulturno-umjetnički program
- Koracima prošlosti
- Naučno-obrazovni program
- Muzički program
- RCG
- R98
- Programska šema
- Trofej Radija Crne Gore
- Frekvencije
- Radio drama
Nauka i tehnologija
12. 04. 2023.
18:50 >> 18:50
3D PRINTER
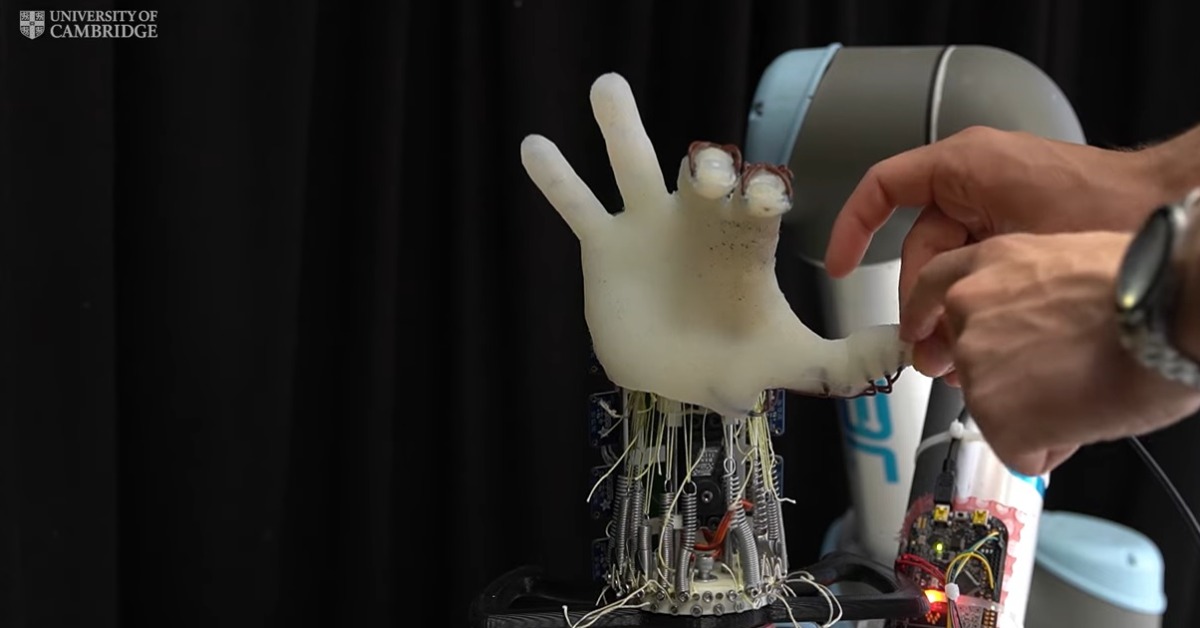
Kembridž razvio jeftinu i energetski efikasnu robotsku ruku
Britanski naučnici s Univerziteta Kembridž dizajnirali su energetski efikasnu robotsku ruku koja može da hvata različite predmete uz minimalno aktiviranje prstiju.
Oslanjajući se na pasivne pokrete ručnog zgloba i taktilne senzore ugrađene u njenu "kožu", robotska ruka proizvedena pomoću 3D printera može izvoditi složene pokrete, a time utire put jeftinoj, energetski učinkovitoj robotici s prirodnijim i prilagodljivijim aktivnostima, prenosi Klix.ba.
Hvatanje predmeta različitih veličina, oblika i tekstura predstavlja značajan izazov za robote, ali istraživači s Kembridža su prevazišli ovaj problem tako što su se fokusirali na pasivno kretanje. Prema njihovim riječima, robotsku ruku je lako kontrolisati, a ona troši znatno manje energije od potpuno motorizovanih robotskih ruku. Eksperimenti su pokazali da je moguće postići značajan raspon pokreta robotske ruke pomijeranjem samo ručnog zgloba.
3D printana antropomorfna ruka je opremljena taktilnim senzorima koji joj omogućavaju da "osjeti" šta dodiruje. Istraživači su proveli više od 1.200 testova kako bi procijenili mogućnosti ruke u hvatanju objekata bez da ih ispusti. U početku je trening obavljan pomoću 3D printanih plastičnih loptica, a ruka je uspješno držala 11 od 14 različitih predmeta uključujući kompjuterski miš i rolnu folije.
Taktilni senzori daju robotu osjećaj za stisak, tako da zna kada predmet počinje da klizi iz ruke.
Pasivni dizajn robotske ruke, koju je razvio Kembridž, u kombinaciji s malim brojem senzora pojednostavljuje kontrolu te pruža širok raspon pokreta, a također pojednostavljuje i proces učenja.
Budući razvoj bi mogao uključivati integraciju sposobnosti robotskog vida i učenje robota da iskoristi svoje okruženje omogućavajući mu da uhvati još više različitih predmeta. Tim trenutno radi na poboljšanju preciznosti i brzine robotske ruke te istražuje nove aplikacije ove tehnologije. Istraživači razvijaju napredniju verziju koja može osjetiti i reagovati na promjene u okruženju kao što su temperatura i vlažnost.




Коментари0
Остави коментар